Represents a robot in a physical system. More...
#include <Robot.h>
Inheritance diagram for Robot:
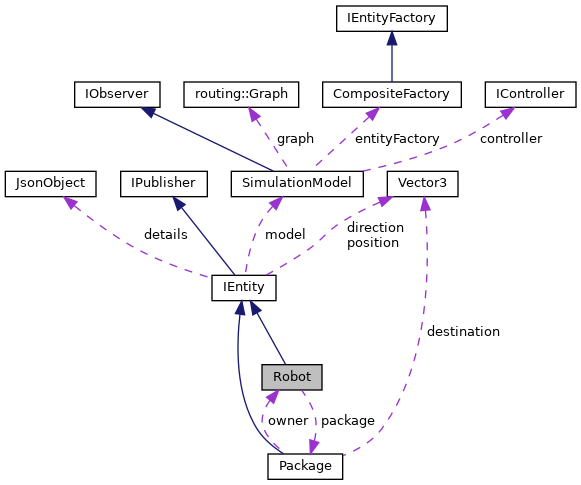
Collaboration diagram for Robot:
Public Member Functions | |
| Robot (const JsonObject &obj) | |
| Constructor. More... | |
| void | update (double dt) |
| Updates the Package. More... | |
| void | receive (Package *p) |
| Receives the passed in package. More... | |
 Public Member Functions inherited from IEntity Public Member Functions inherited from IEntity | |
| IEntity () | |
| Constructor that assigns a unique ID to the entity. | |
| IEntity (const JsonObject &details) | |
| Constructor with JsonObject details to define the entity. More... | |
| virtual | ~IEntity () |
| Virtual destructor for IEntity. | |
| virtual void | linkModel (SimulationModel *model) |
| Links this entity to a simulation model, giving it access to the model's public variables and functions. More... | |
| virtual int | getId () const |
| Gets the ID of the entity. More... | |
| virtual Vector3 | getPosition () const |
| Gets the position of the entity. More... | |
| virtual Vector3 | getDirection () const |
| Gets the direction of the entity. More... | |
| virtual const JsonObject & | getDetails () const |
| Gets the details of the entity. More... | |
| virtual std::string | getColor () const |
| Gets the color of the entity. More... | |
| virtual std::string | getName () const |
| Gets the name of the entity. More... | |
| virtual double | getSpeed () const |
| Gets the speed of the entity. More... | |
| virtual void | setPosition (Vector3 pos_) |
| Sets the position of the entity. More... | |
| virtual void | setDirection (Vector3 dir_) |
| Set the direction of the entity. More... | |
| virtual void | setColor (std::string col_) |
| Sets the color of the entity. More... | |
| virtual void | rotate (double angle) |
| Rotate the entity around y axis. More... | |
| virtual SimulationModel * | getModel () const |
| Public Member Functions inherited from IPublisher | |
| void | addObserver (const IObserver *o) |
| adds an observer to the simulation More... | |
| void | removeObserver (const IObserver *o) |
| removes an observer in the simulation More... | |
| void | notifyObservers (const std::string &message) const |
| notifies all observers with a specific message More... | |
Public Attributes | |
| bool | requestedDelivery = true |
Protected Attributes | |
| Package * | package = nullptr |
| Protected Attributes inherited from IEntity | |
| SimulationModel * | model = nullptr |
| int | id = -1 |
| JsonObject | details |
| Vector3 | position |
| Vector3 | direction |
| std::string | color |
| std::string | name |
| double | speed = 0 |
Detailed Description
Represents a robot in a physical system.
Robots move using euler integration based on a specified velocity and direction.
Constructor & Destructor Documentation
◆ Robot()
| Robot::Robot | ( | const JsonObject & | obj | ) |
Constructor.
- Parameters
-
obj JSON object containing the robot's information
Member Function Documentation
◆ receive()
| void Robot::receive | ( | Package * | p | ) |
Receives the passed in package.
- Parameters
-
Package* Package to be received by the robot
◆ update()
|
virtual |
The documentation for this class was generated from the following file:
- /home/spring-2025/drone_simulation/service/include/simulationmodel/entity/Robot.h