Strategy interface. More...
#include <IStrategy.h>
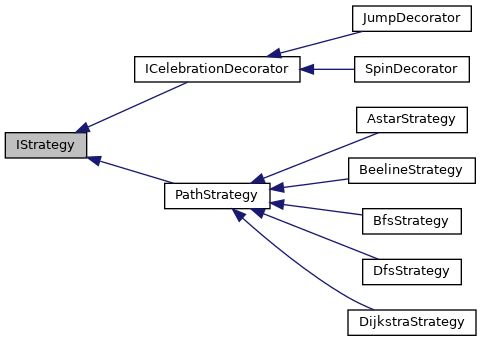
Inheritance diagram for IStrategy:
Public Member Functions | |
| virtual | ~IStrategy () |
| Destructor. | |
| virtual void | move (IEntity *entity, double dt)=0 |
| Move toward next position. More... | |
| virtual bool | isCompleted ()=0 |
| Check if the trip is completed. More... | |
| virtual double | currentPathDistance (Vector3 startPosition) |
| Get the current distance of the entire path starting from startPosition and the current index. More... | |
| virtual double | totalPathDistance (Vector3 startPosition) |
| Get the total distance of the entire path starting from startPosition and index 0. More... | |
Detailed Description
Strategy interface.
Member Function Documentation
◆ currentPathDistance()
|
inlinevirtual |
Get the current distance of the entire path starting from startPosition and the current index.
- Returns
- double of current distance to final destination of this path starting from startPosition and the current index
Reimplemented in PathStrategy, and ICelebrationDecorator.
◆ isCompleted()
|
pure virtual |
Check if the trip is completed.
- Returns
- True if complete, false if not complete
Implemented in PathStrategy, and ICelebrationDecorator.
◆ move()
|
pure virtual |
Move toward next position.
- Parameters
-
entity Entity to move dt Delta Time
Implemented in PathStrategy, and ICelebrationDecorator.
◆ totalPathDistance()
|
inlinevirtual |
Get the total distance of the entire path starting from startPosition and index 0.
- Returns
- double of total distance to final destination of this path starting from startPosition
Reimplemented in PathStrategy, and ICelebrationDecorator.
The documentation for this class was generated from the following file:
- /home/spring-2025/drone_simulation/service/include/simulationmodel/strategy/IStrategy.h